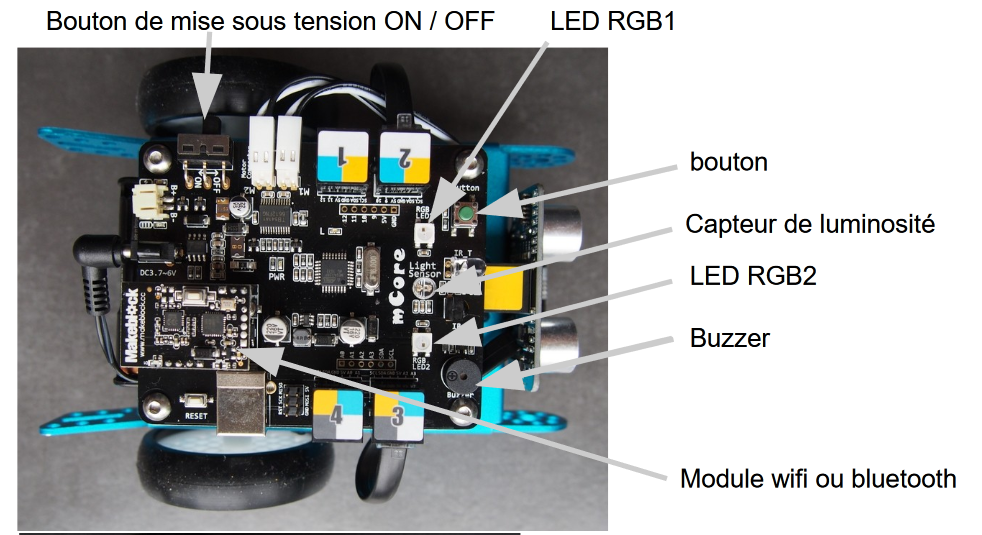
mBot est un robot modulaire programmable avec l'environnement de programmation mBlock basé sur Scratch.
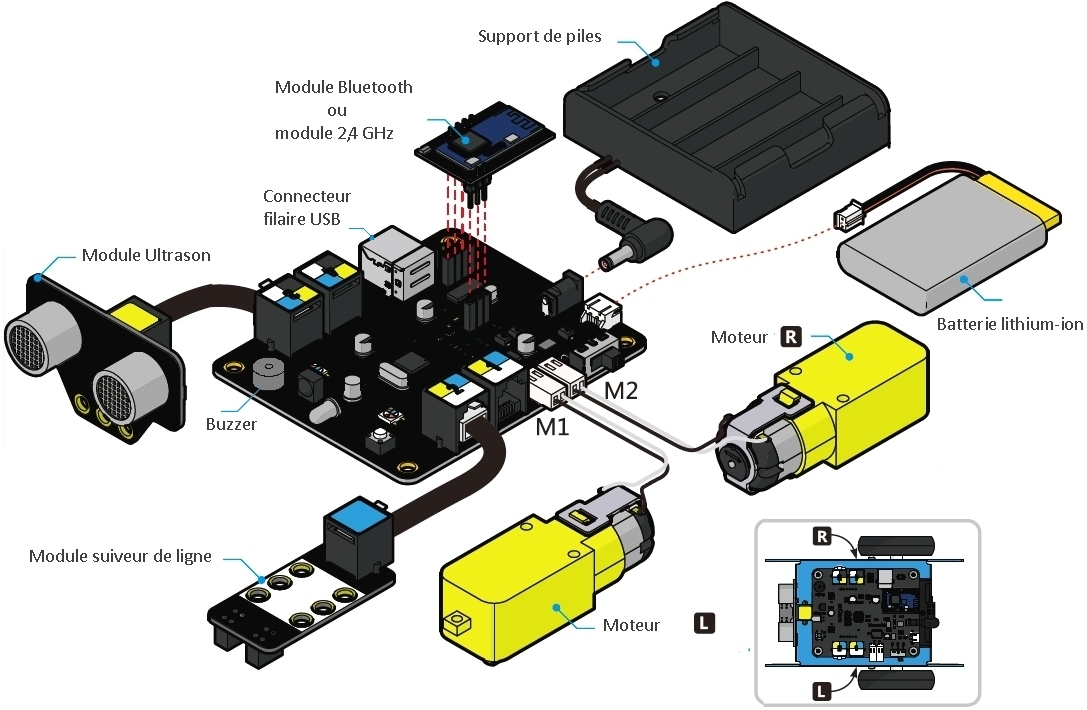
Il est constitué d'un châssis robuste en aluminium équipé de deux motoréducteurs et d'une carte de pilotage (arduino). Il peut détecter des obstacles, suivre une ligne, émettre des sons et des signaux lumineux, recevoir des ordres d'une télécommande, communiquer par un canal infrarouge avec un autre robot...


Kit Robot Éducatif STEM 3-en-1 mBot Ranger MakeBlock
Trois formes permettant de construire différents modèles : char robotique, voiture robotique auto-équilibrée et voiture robotique à 3 roues.


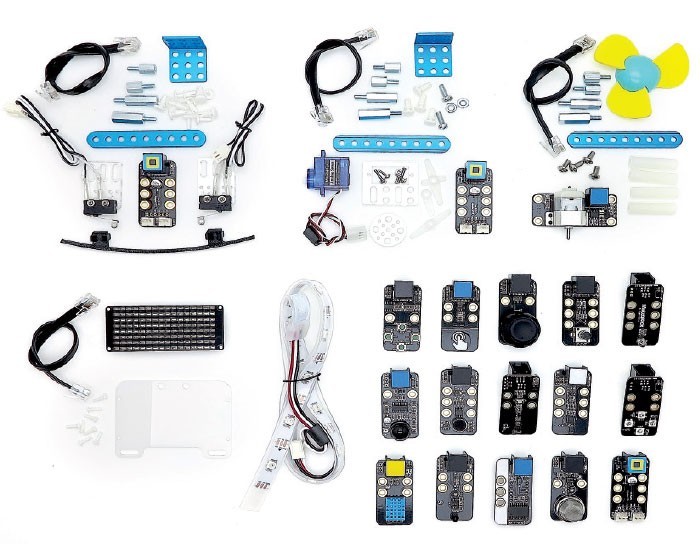
Des capteurs ou actionneurs disponibles à l'unité ou regroupés en packs. Exemples :
Pack "Add-on" Makeblock
1 x Module "Me Light"
1 x Module "Me PIR Motion Sensor"
1 x Sonde "Me Température Sensor"
1 x Module "Me RGB LED"
1 x Module "Me 7 segment Serial Display"
1 x Module "Me Joystick"
1 x Module "Me Potentiometer"
1 x Module "Me RJ45 Adapter"
2 x Cordon 6P6C RJ25 (20 cm)
1 x Cordon 6P6C RJ25 (35 cm)
10 x Vis M4x8
10 x Ecrous

20 modules complémentaire mBot - Makeblock
capteurs : kit pare-chocs, 4 boutons-poussoirs, tactile, joystick, potentiomètre rotatif, lumière, présence, température / humidité, gaz, flamme, son, boussole, angulaire 3 axes ;
affichage : 4 LED RVB, afficheur 4 digits, ruban 15 LED RVB, kit matrice 8x16 LED ;
actionneurs : kit tourelle 1 axe, kit mini ventilateur ;
connectique : modules me RJ25 (3 pièces), cordons RJ25 20 cm (16 pièces) / 50 cm (2 pièces) ;
éléments de fixation des modules : 16 barres, 16 équerres 75 rivets clips, 50 attaches à pression, 100 entretoises hexagonales ;
fiches exercices de programmation (MB-EXO-PROG) ;
boîte de rangement + jeu d'autocollants d'identification de modules.
Exercices de programmation avec Mblock (ordinateur)⚓
Préambule
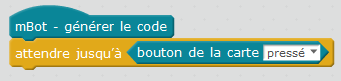
Si vous connectez le robot en bluetooth, les programmes débuteront par :

Si vous connectez le robot via le port USB, les programmes débuteront par :
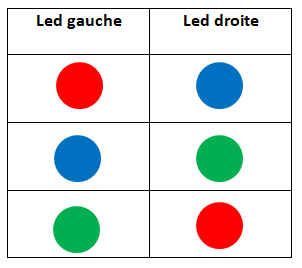
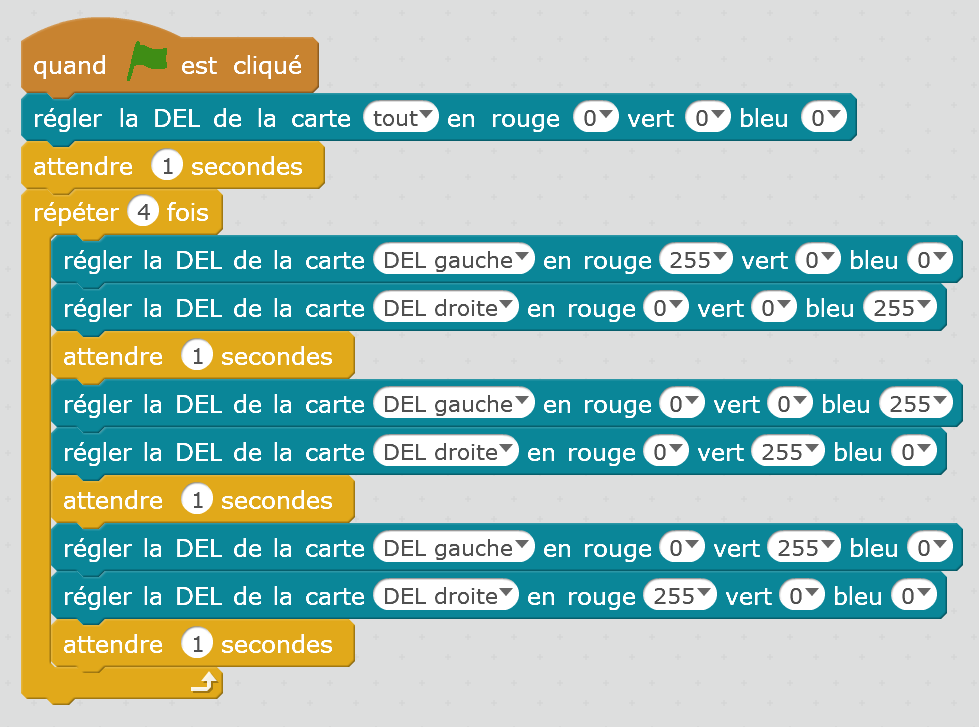
Programme 1 : Leds⚓
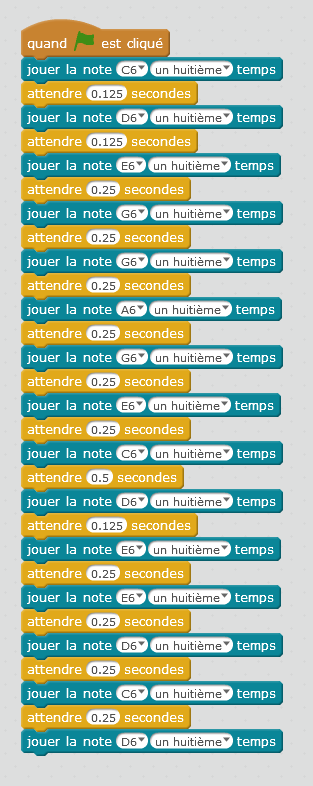
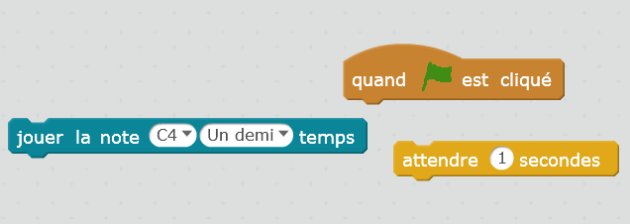
Programme 2 : le robot musicien⚓
Programme 3 : Déplacer le robot et raconter une histoire⚓
Sauver Robinson !
Question⚓
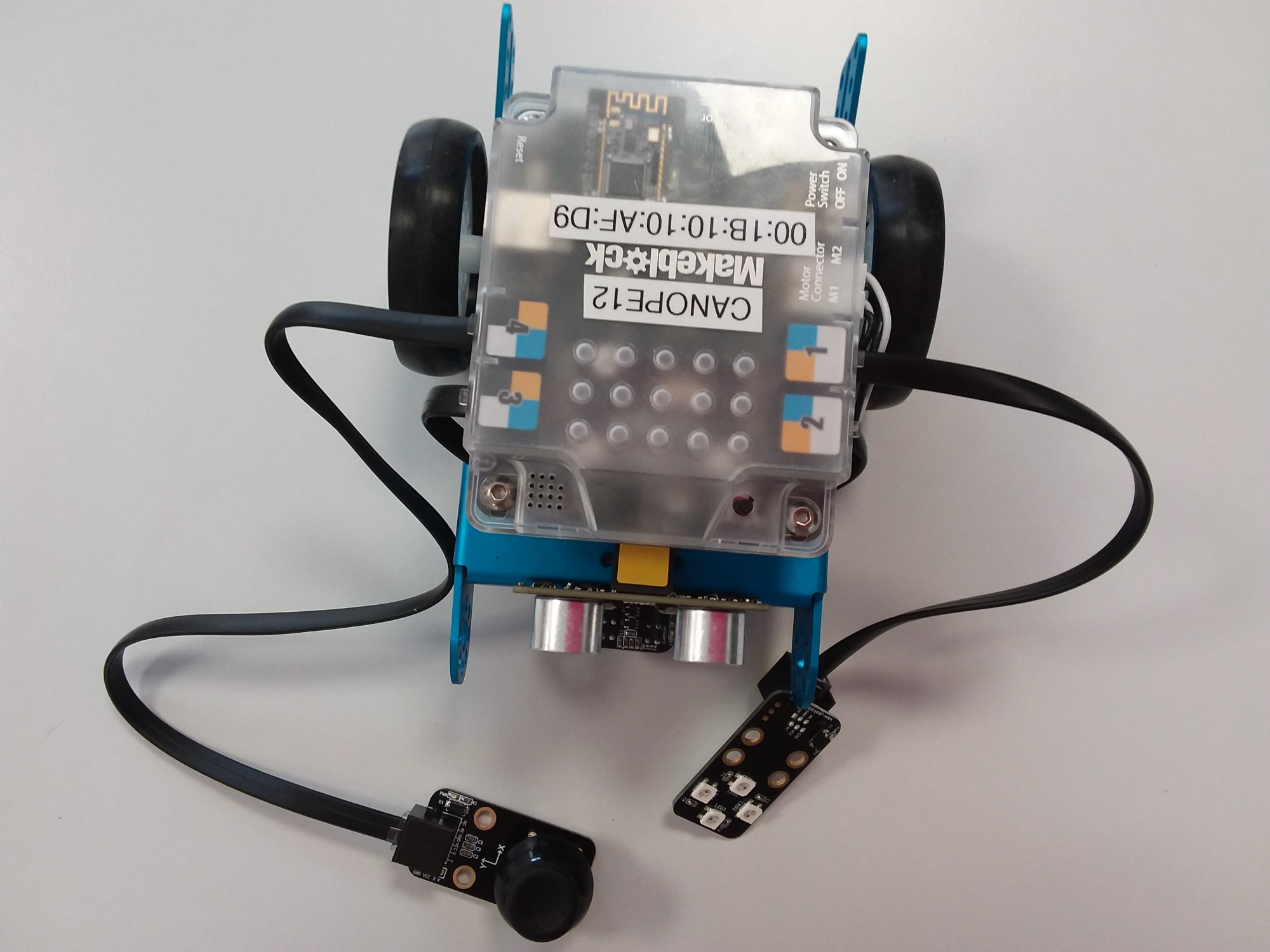
Placer le robot sur le port et les différents éléments fournis comme sur l'image ci-dessous :
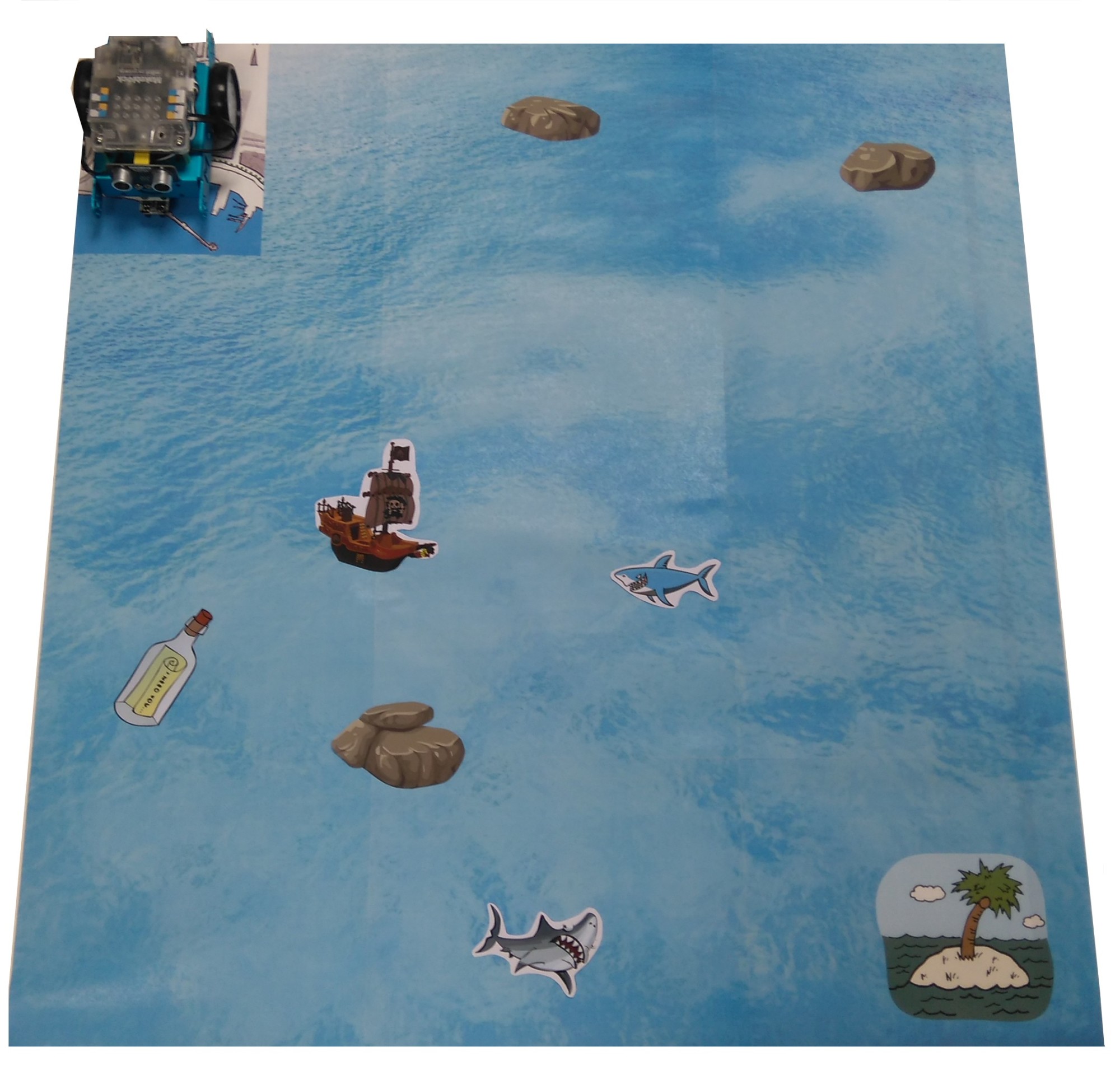
L'histoire à coder :
1/ Le robot doit se rendre sur la bouteille pour "lire" le message de détresse de Robinson. Il y reste 3 secondes en changeant de couleur ses Leds ("Lecture du message..."). Après ces 3 secondes, il émet un son ("Compréhension du message").
2/ Il fait marche arrière et trouve un chemin pour aller sur l'île de Robinson en évitant les pirates, requins et récifs.
3/ Une fois arrivé, il émet un son 5 fois tout en allumant ses leds en vert "de joie..." : l'histoire est terminée tout comme le programme.
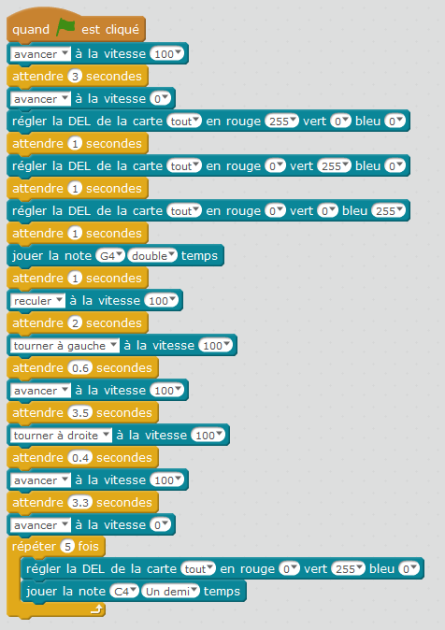
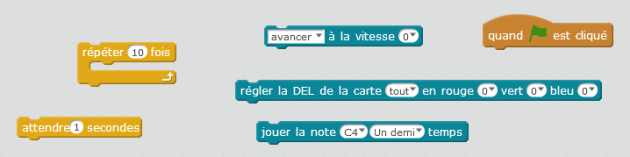
Conseil : Voici les blocs que nous conseillons d'utiliser :
Programme 4 : Affichage sur la matrice led⚓
Conseil : Voici les blocs que nous conseillons d'utiliser :

Conseil : Voici les blocs à utiliser pour ce programme :
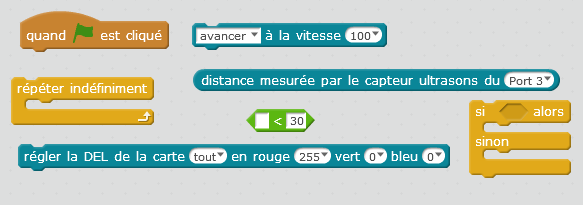
Programme 5 : Contournement d'obstacles⚓
Question⚓
Le programme doit permettre au robot de se déplacer en contournant les obstacles.
Lorsque le robot se déplace (vitesse 255), ses leds sont vertes.
Lorsque la distance mesurée par le capteur à ultrasons est inférieure à 30mm, les leds deviennent rouge, il recule en tournant à droite (vitesse 100).
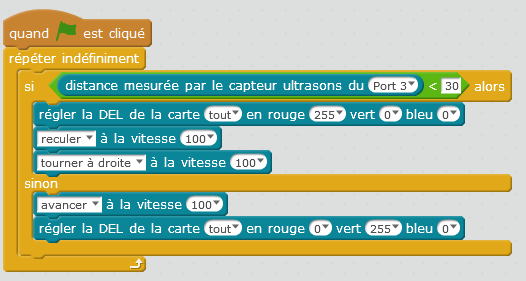
Conseil : Voici les blocs que nous conseillons d'utiliser :
Programme 6 : Suivi de ligne⚓
Question⚓
Placer le robot sur la ligne (bande) noire du tapis de jeu fourni.
Le programme doit permettre au robot de suivre indéfiniment cette ligne (bande) tout au long du parcours. Vous utiliserez les capteurs de suivi de ligne.
Il est préférable de téléverser le programme via le port USB pour cet exercice.
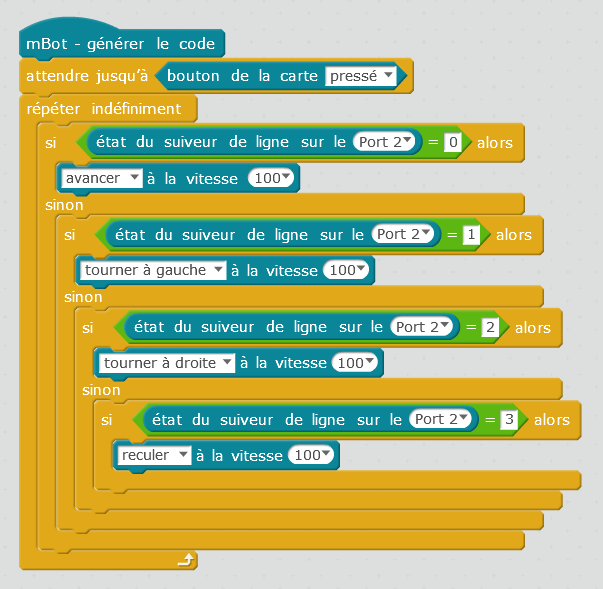
Conseil : Voici les blocs que nous conseillons d'utiliser :
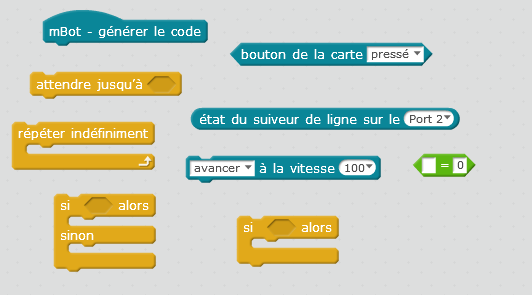
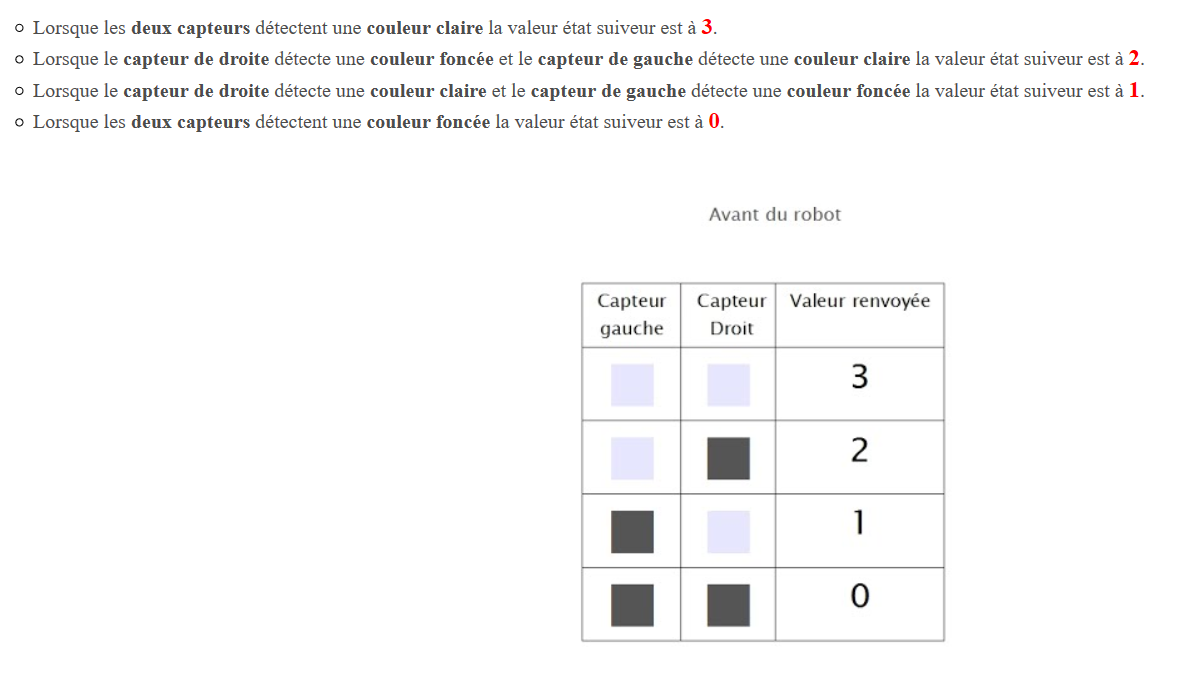
Conseil :
Valeurs des capteurs de suivi de ligne :
Un parcours à imprimer
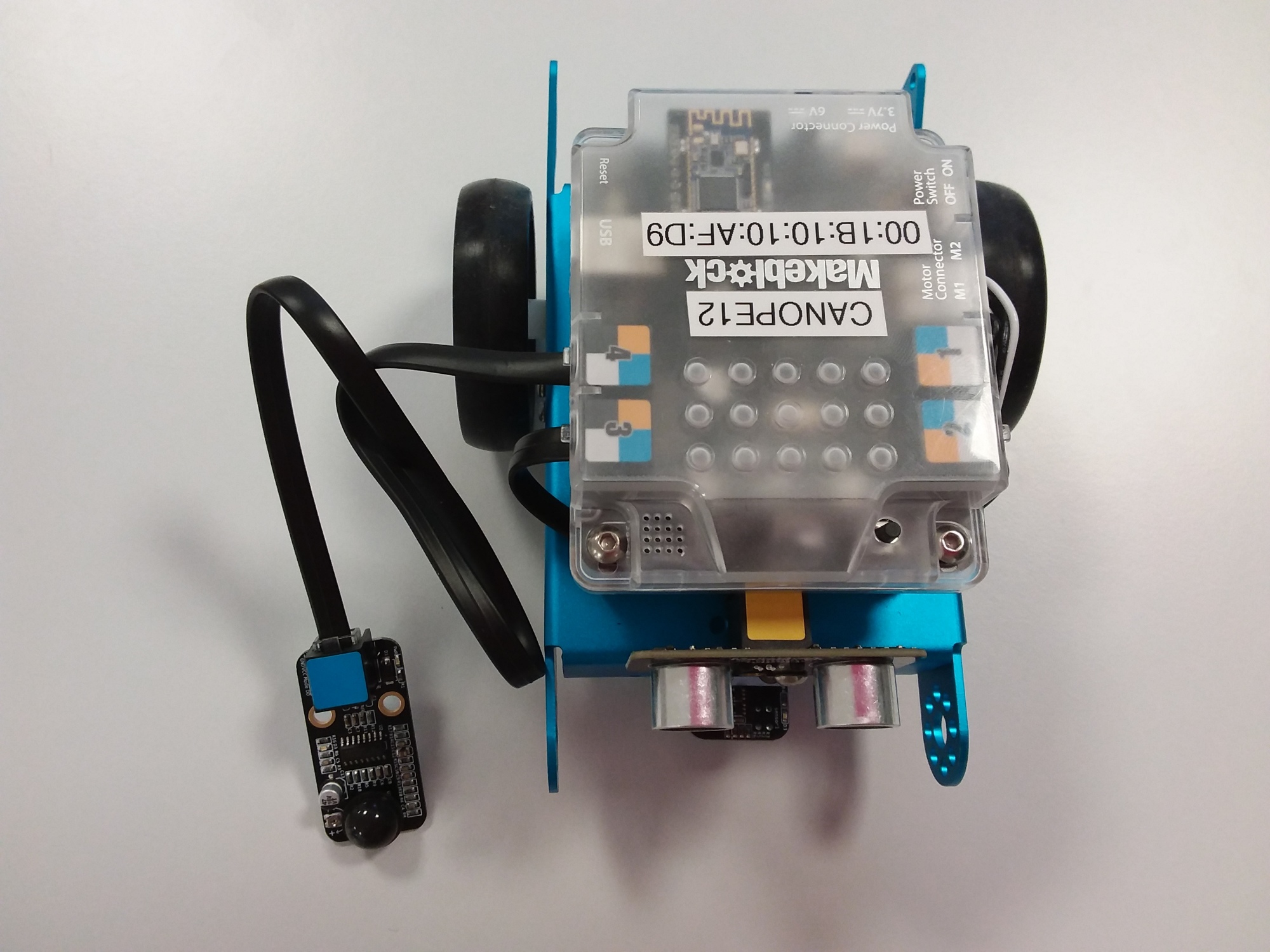
Programme 7 : Détecteur de mouvement⚓



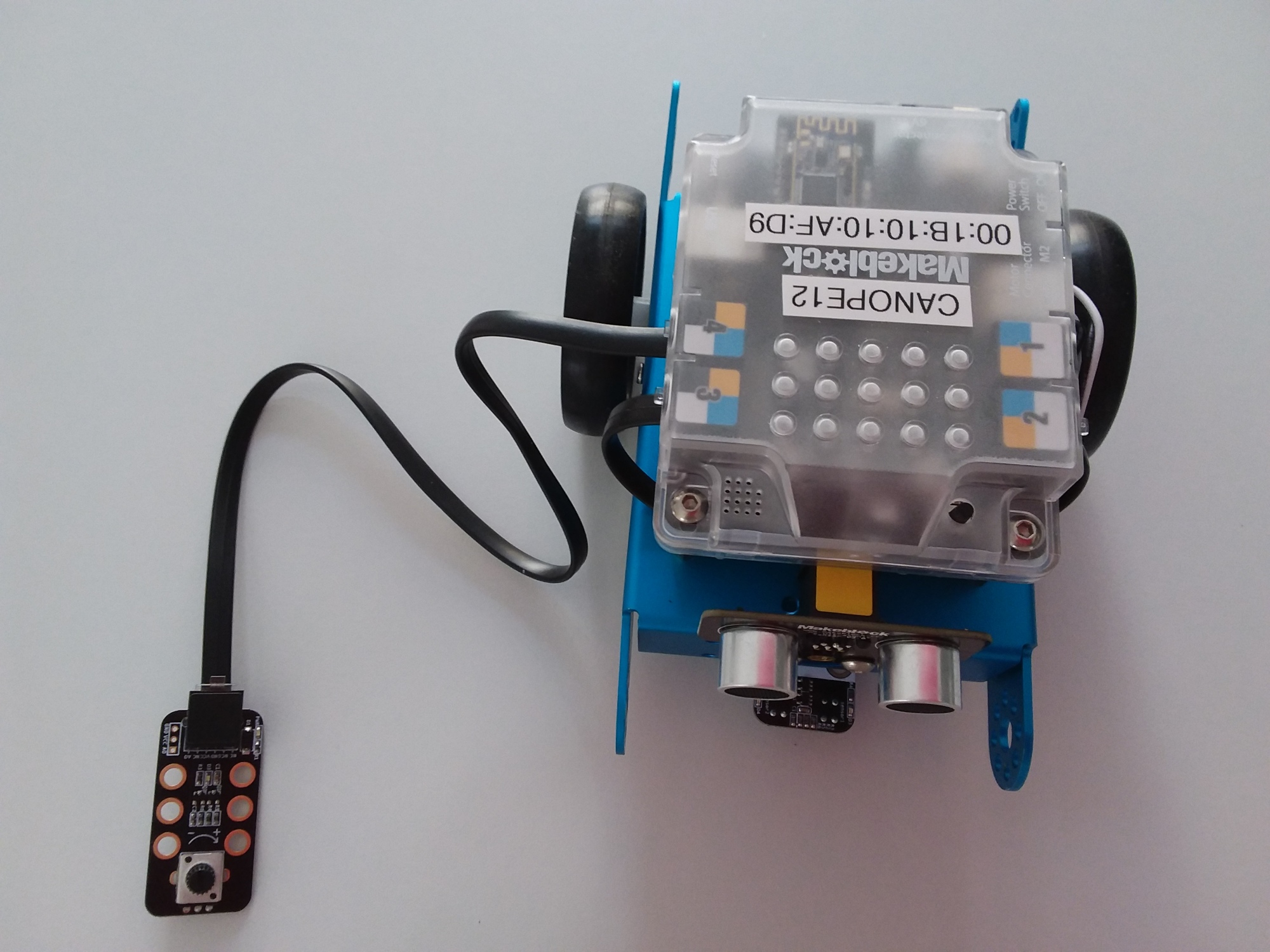
Programme 8 : Potentiomètre⚓
Question⚓
Utiliser le module potentiomètre connecté au port 4 du Mbot.
Le programme doit permettre de modifier la fréquence de marche du sprite en fonction de la valeur du fournie par le potentiomètre..

Créer une variable p à laquelle sera affectée la "valeur" du potentiomètre.
Si p<10 : sprite immobile (premier costume).
Si 10<p<300 : bascule entre les costumes du sprite au bout de 1,2s
Si 300<p<600 : bascule entre les costumes du sprite au bout de 0,6s
Si 600<p : bascule entre les costumes du sprite au bout de 0,1s
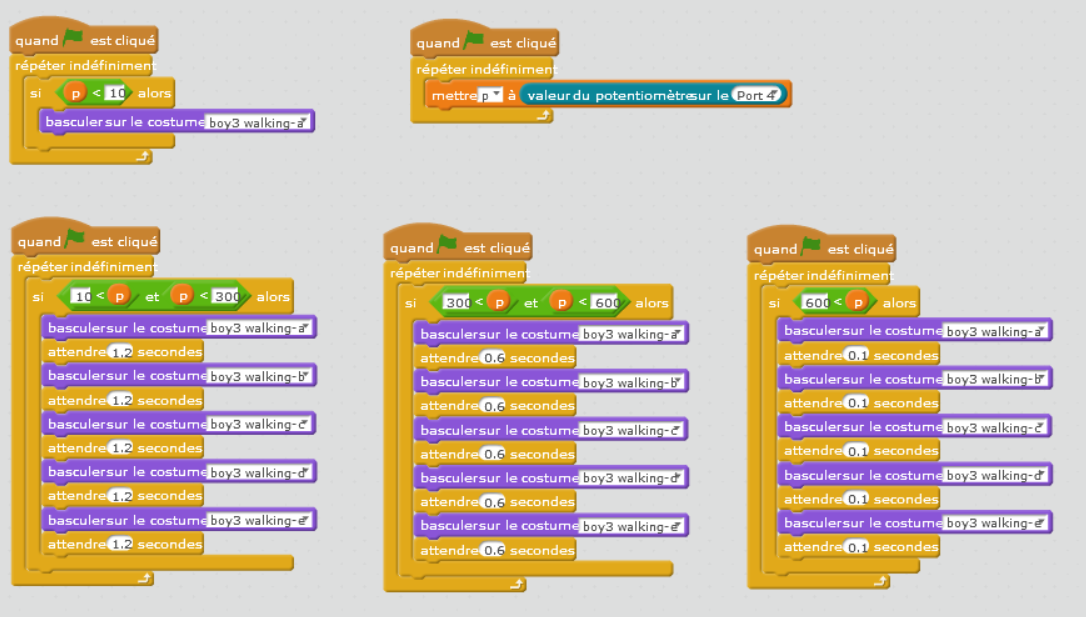
Conseil : Voici les blocs que nous conseillons d'utiliser :

Programme 9 : Intensité de lumière⚓
Question⚓
Utiliser le capteur d'intensité de lumière ambiante connecté au port 4 du Mbot.

Le programme doit permettre "d'allumer" les chandelles en fonction de l'obscurité.

Créer une variable L qui stockera la valeur du capteur de luminosité.
Si 800<L : 0 bougie allumée
Si 600<L<800 : 3 bougies allumées
Si 400<L<600 : 6 bougies allumées
Si L<400 : 9 bougies allumées

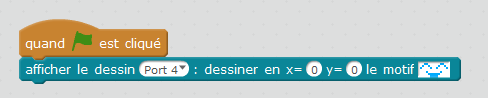
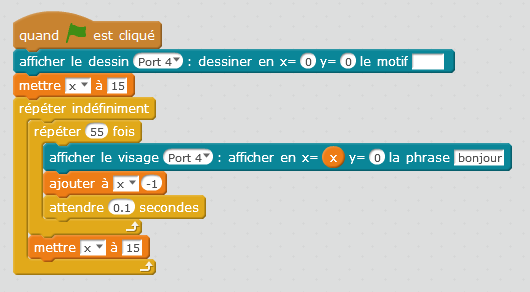
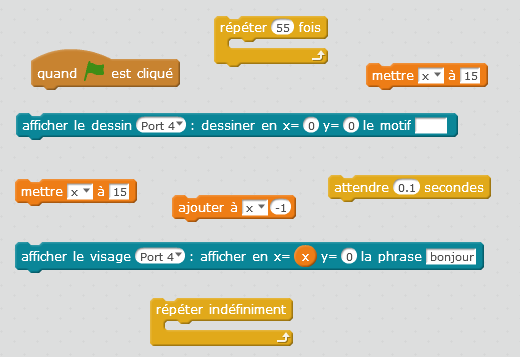
Conseil : Voici les blocs que nous conseillons d'utiliser :

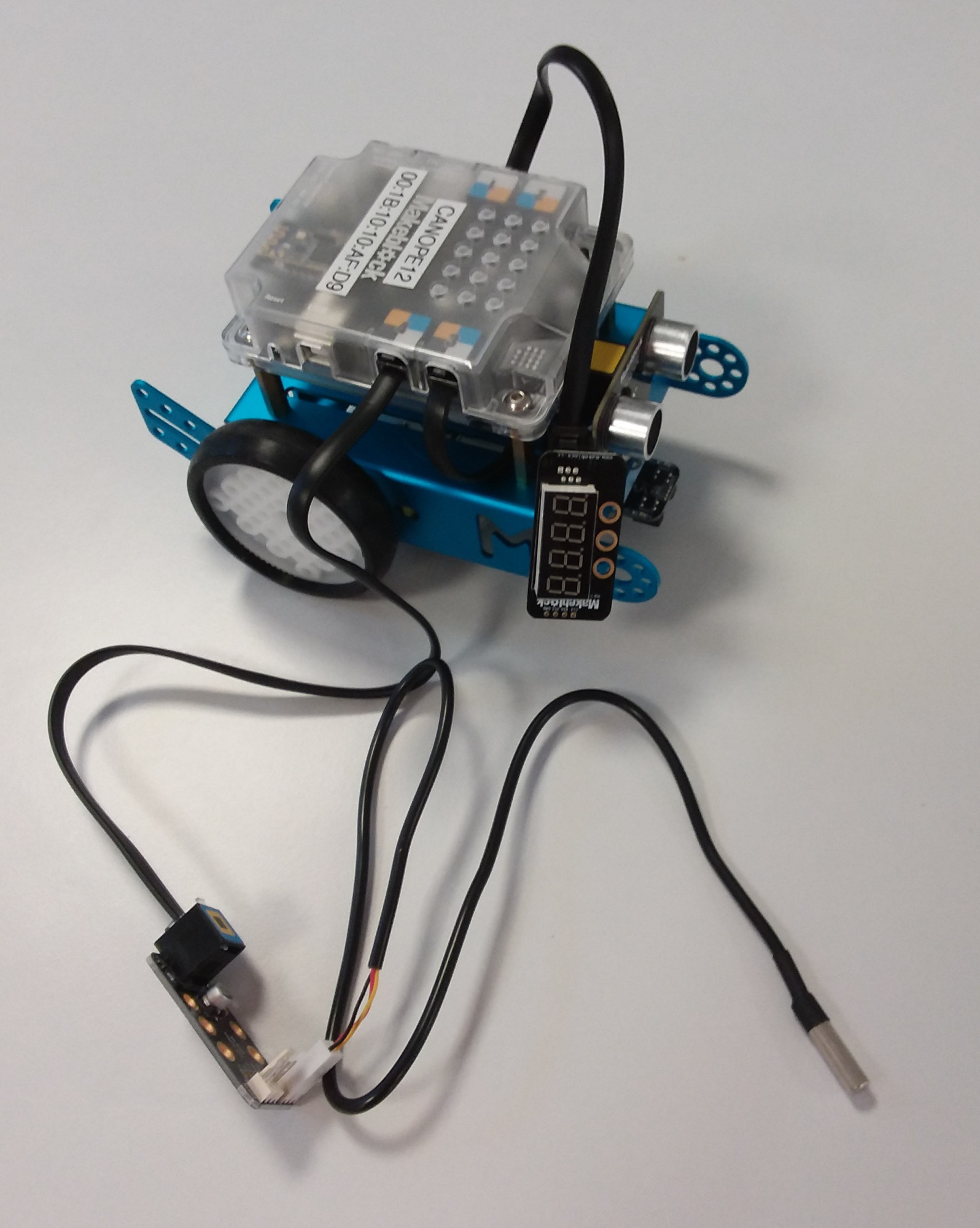
Programme 10 : Température⚓
Question⚓
Utiliser le capteur de température connecté au slot1 de l'adaptateur RJ45. Ce dernier est lui-même connecté au port 4 du Mbot.
Utiliser le module afficheur 7 segments connecté au port 1 du Mbot.
Le programme doit permettre d'afficher la température.
Pour une température inférieure à 24°C, le panda a un aspect "normal".
Pour une température supérieure à 24°C, le panda va "rougir" et le robot va émettre une sirène de pompier.

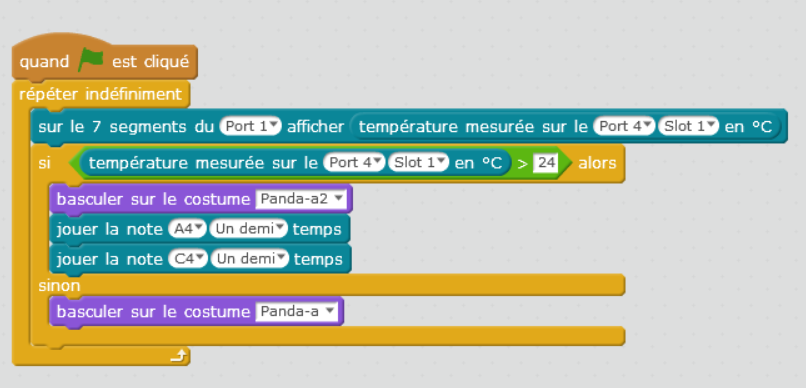
Conseil : Voici les blocs que nous conseillons d'utiliser :

Programme 11 : Joystick⚓
Question⚓
Utiliser le joystick connecté au port 4 du Mbot.
Utiliser le module RGB led connecté au part 1 du Mbot.
Le programme doit permettre de diriger le panda sur l'écran à l'aide du joystick et "témoigner" de la vitesse de déplacement par la couleur des leds.
Créer les variables h et v auxquelles seront affectées les valeurs x et y du joystick.
Si les valeurs sont comprises entre 10 et 350 : le sprite se déplace de 1px, la led associée à l'axe est verte.
Si les valeurs sont supérieures à 350 : le sprite se déplace de 5px, la led associée à l'axe est rouge
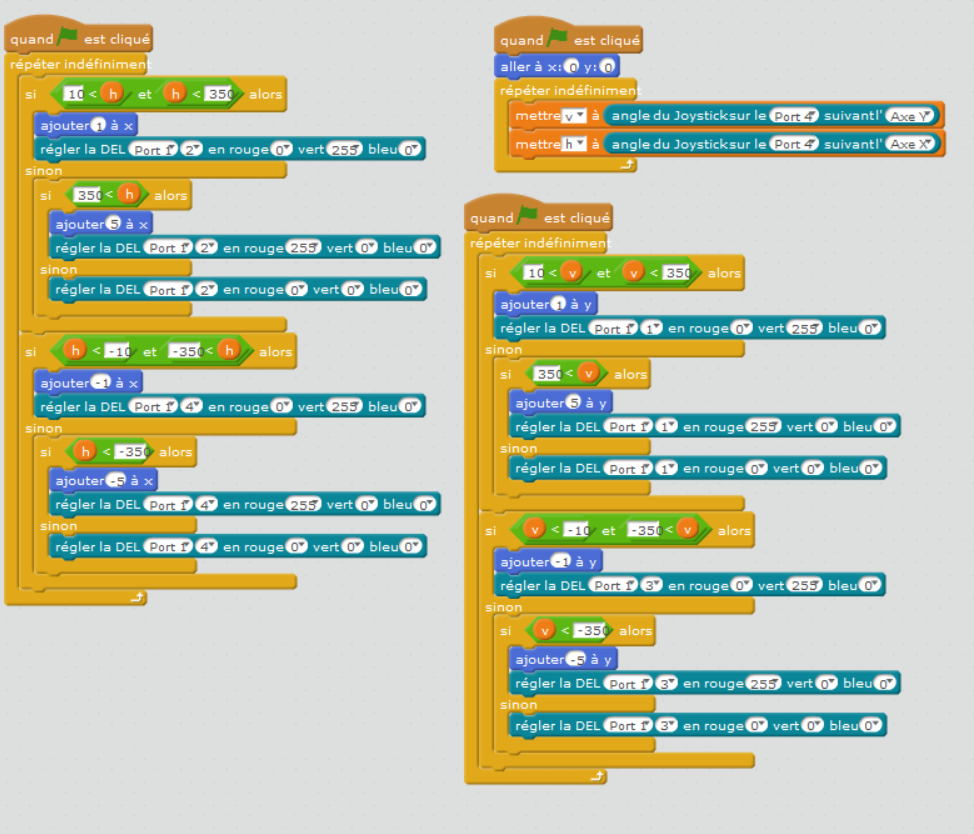
Conseil : Voici les blocs que nous conseillons d'utiliser :
