Préambule⚓
Si vous connectez le robot en bluetooth, les programmes débuteront par :
Si vous connectez le robot via le port USB, les programmes débuteront par :
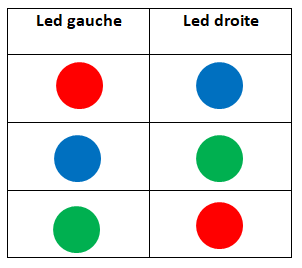
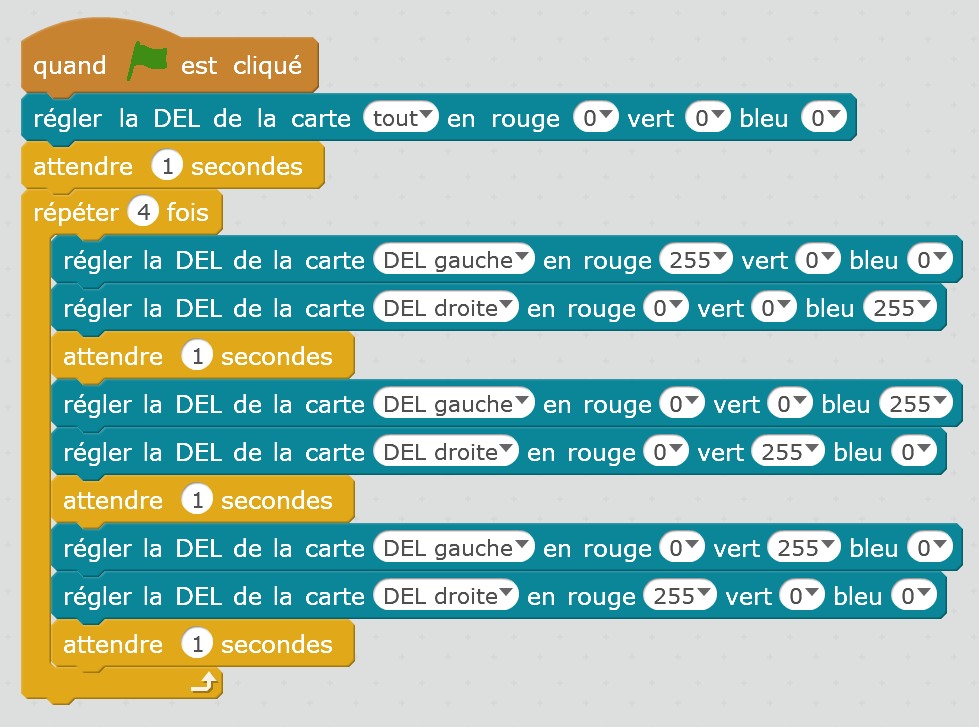
Programme 1 : Leds⚓

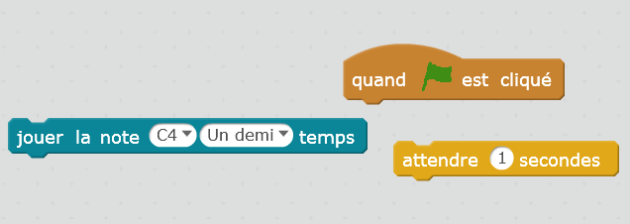
Programme 2 : le robot musicien⚓

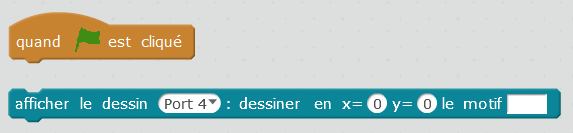
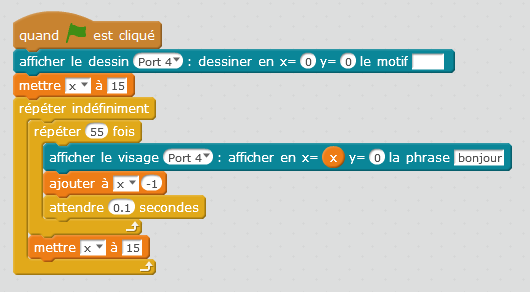
Programme 3 : Affichage sur la matrice led⚓
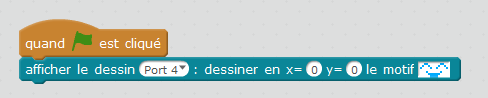
Conseil : Voici les blocs que nous conseillons d'utiliser :
Conseil : Voici les blocs à utiliser pour ce programme :

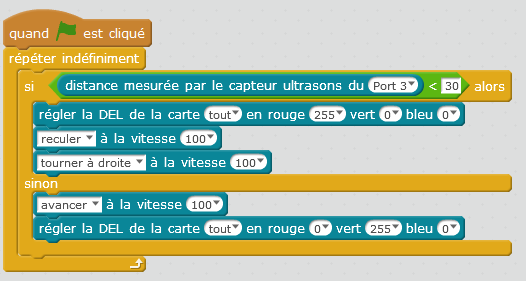
Programme 4 : Contournement d'obstacles⚓
Question⚓
Le programme doit permettre au robot de se déplacer en contournant les obstacles.
Lorsque le robot se déplace (vitesse 255), ses leds sont vertes.
Lorsque la distance mesurée par le capteur à ultrasons est inférieure à 30mm, les leds deviennent rouge, il recule en tournant à droite (vitesse 100).
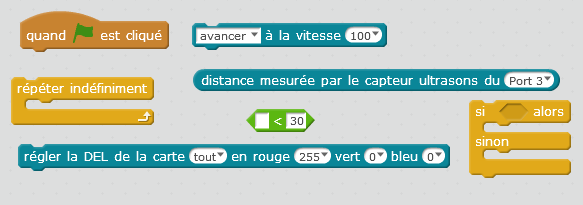
Conseil : Voici les blocs que nous conseillons d'utiliser :
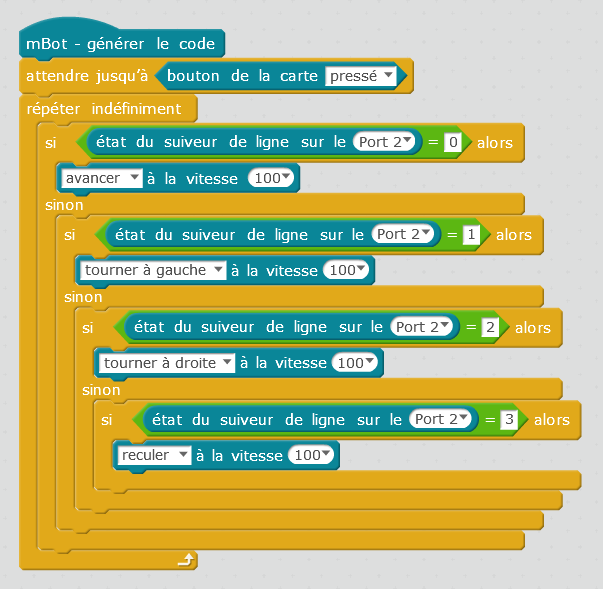
Programme 5 : Suivi de ligne⚓
Question⚓
Placer le robot sur la ligne (bande) noire du tapis de jeu fourni.
Le programme doit permettre au robot de suivre indéfiniment cette ligne (bande) tout au long du parcours. Vous utiliserez les capteurs de suivi de ligne.
Il est préférable de téléverser le programme via le port USB pour cet exercice.
Conseil : Voici les blocs que nous conseillons d'utiliser :
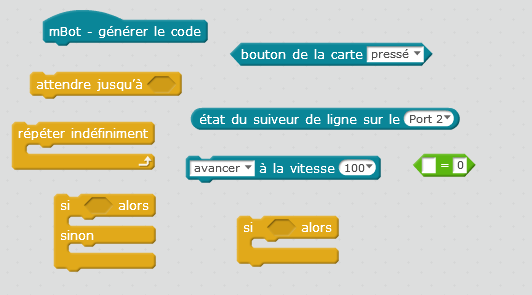
Conseil :
Valeurs des capteurs de suivi de ligne :
