Conseil :
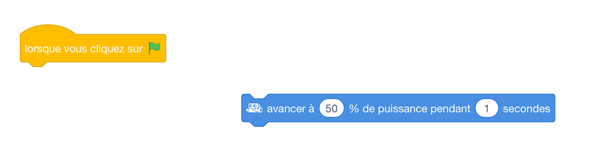
Si vous connectez le robot en bluetooth avec tablette (ou en mode direct depuis votre PC), les programmes débuteront par :
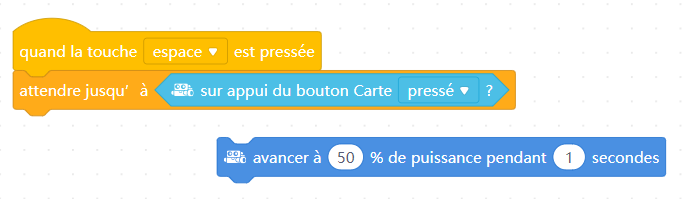
Si vous connectez le robot via le port USB (en mode téléversement) depuis votre PC, les programmes débuteront par :
Programme 1 : Déplacement simple⚓
Question⚓
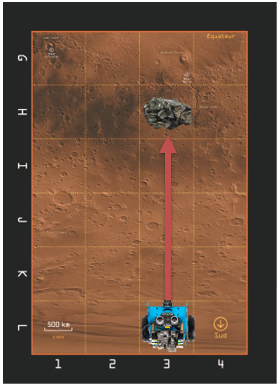
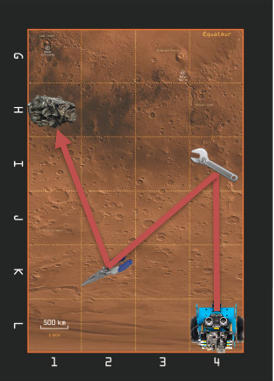
Le robot est arrivé sur Mars et devra récupérer des roches...
Place le robot sur la carte de mars comme sur l’image.
Place la roche en face du robot.
Programme le robot pour qu’il se déplace jusqu’à la roche et s’arrête juste sur sa case.
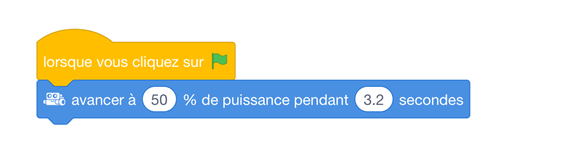
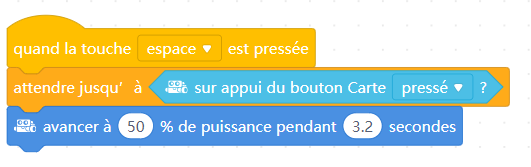
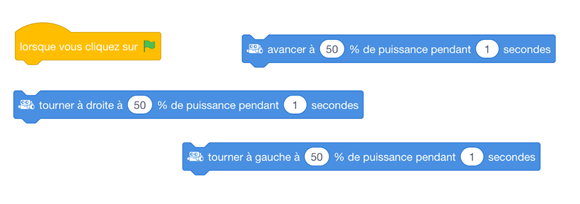
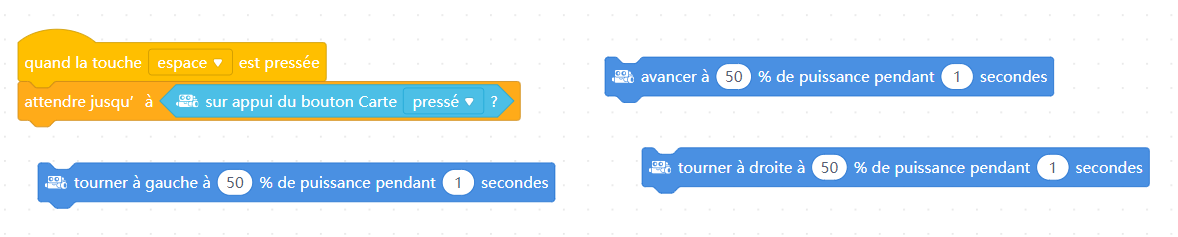
Conseil : Voici les blocs que nous conseillons d'utiliser :
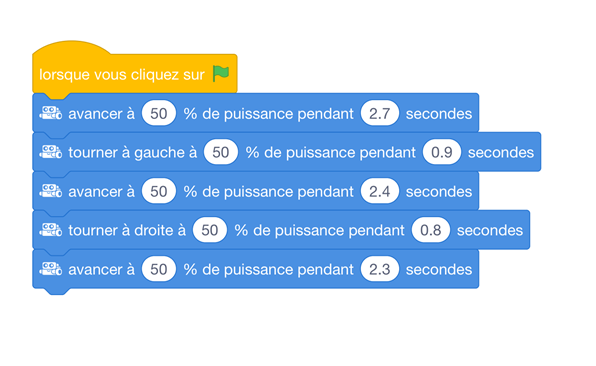
Via bluetooth ou mode direct
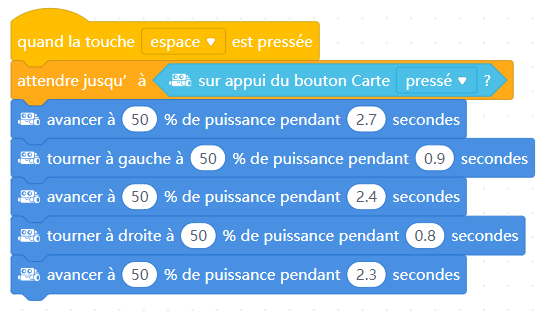
Via le port USB (en mode téléversement) depuis votre PC
Programme 2 : Déplacement complexe⚓
Question⚓
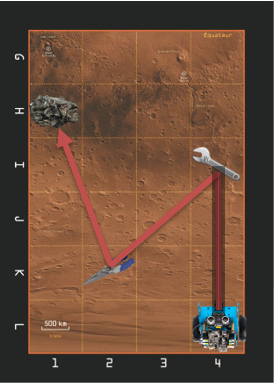
En atterrissant sur Mars le robot a perdu quelques outils.
Avant de récupérer la roche, il te faudra d’abord récupérer ses outils.
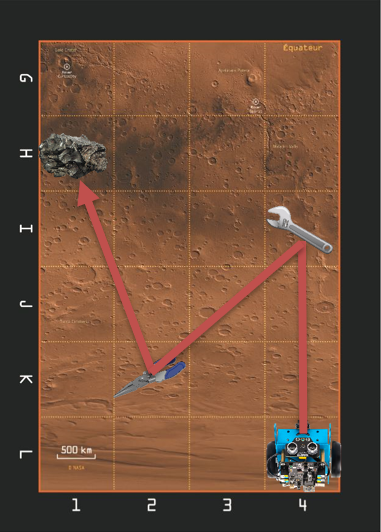
Place le robot sur la carte de mars comme sur l’image.
Place les outils et la roche.
Pour réussir ce défi, tu dois réaliser un seul programme le robot pour qu’il se déplace d’outil en outil puis jusqu’à la roche en lignes droites.
Ton défi sera relevé lorsque le robot effectuera tout le parcours en appuyant une seule fois sur le bouton « jouer ».
Conseil : Voici les blocs que nous conseillons d'utiliser :
Via bluetooth ou mode direct
Via le port USB (en mode téléversement) depuis votre PC
Programme 3 : Déplacement complexe et actionneurs⚓
Question⚓
Pour cette étape, tu vas devoir compléter ton programme précédent.
Chaque fois que le robot récupèrera un outil, il jouera une note de musique de ton choix et allumera ses LEDs (lumières sur le dessus du robot) avec une couleur différente à chaque fois.
Arrivé au rocher, il pourra jouer une mélodie de plusieurs notes et allumer ses LEDs avec plusieurs couleurs.

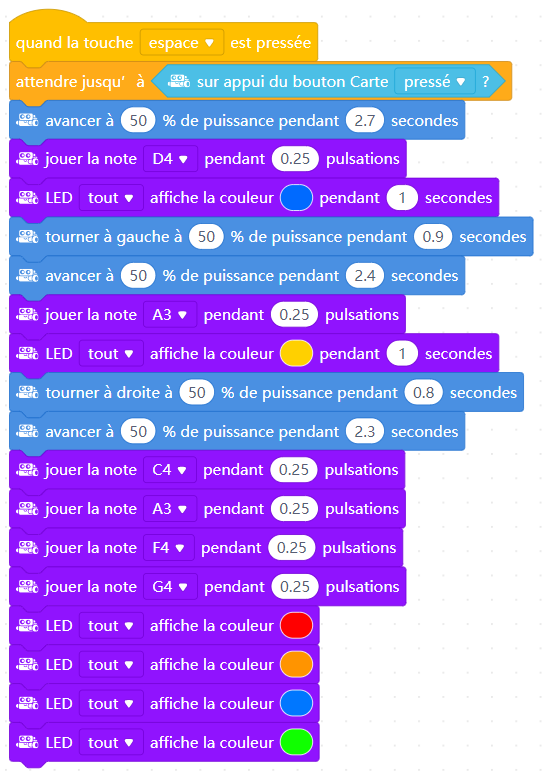
Conseil : Voici les blocs que nous conseillons d'utiliser :
Via bluetooth ou mode direct
Via le port USB (en mode téléversement) depuis votre PC
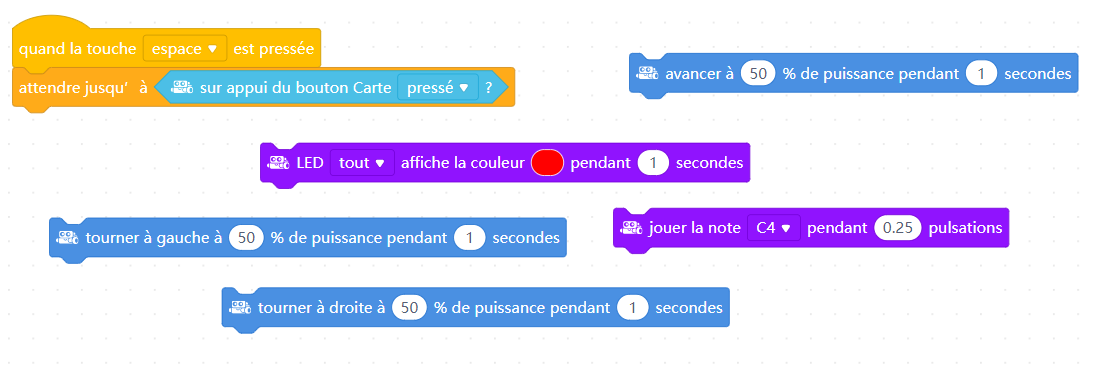
Conseil :
Regarde ce qui se passe lorsque tu cliques sur la couleur rouge de ce bloc : ![]()
Programme 4 : Déplacement complexe et matrice LED avec variables⚓
Question⚓
Pour cette étape, tu vas devoir compléter ton programme précédent.
Ajoute l’écran LED sur le robot.
Chaque fois que le robot récupèrera un outil, le nom de l’outil s’affichera sur l’écran LED (pas d’accent).
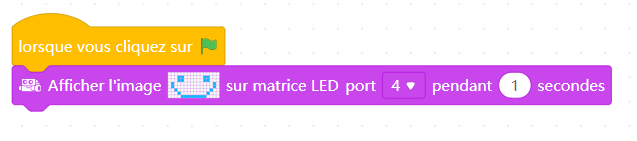
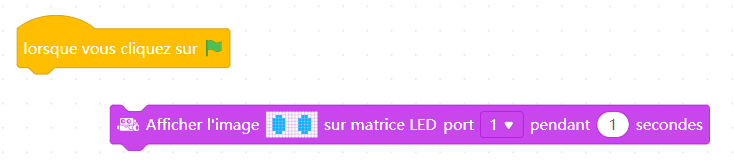
Arrivé au rocher, l’écran LED affichera un visage Souriant et qui fait un clin d’œil (10 fois).
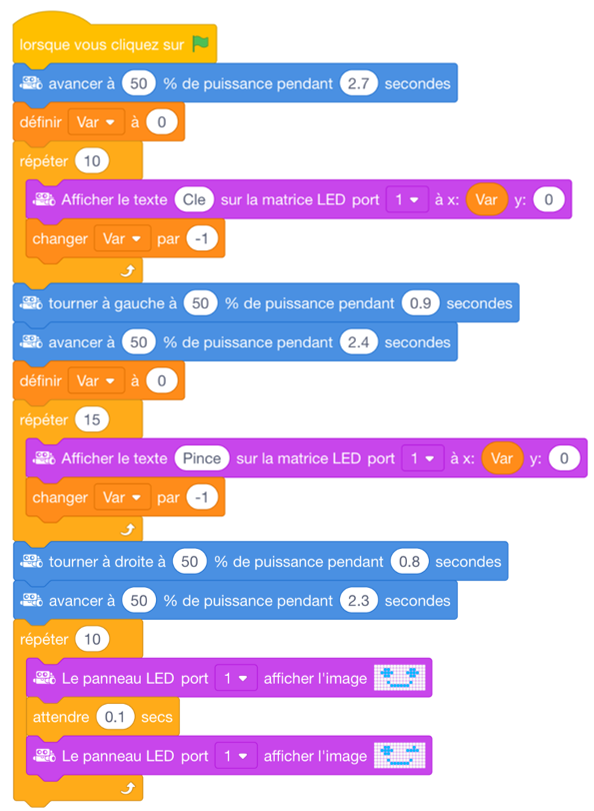
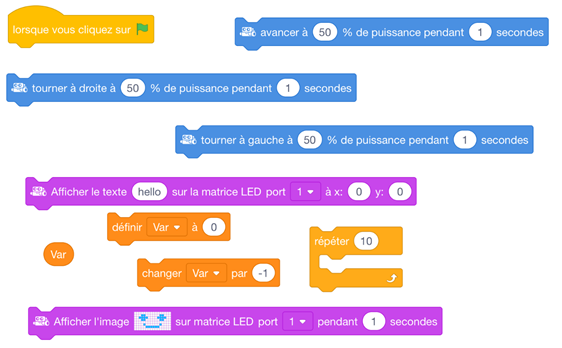
Conseil : Voici les blocs que nous conseillons d'utiliser :
Via bluetooth ou mode direct
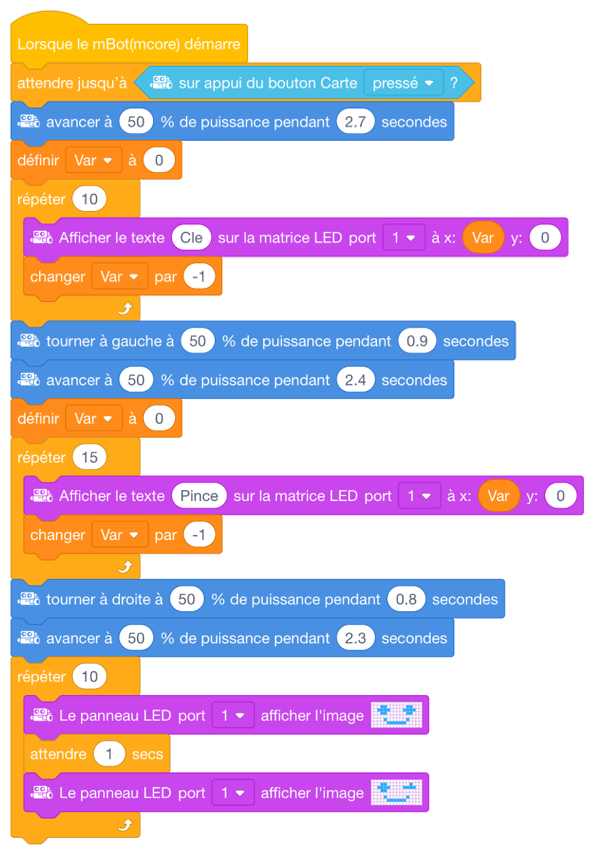
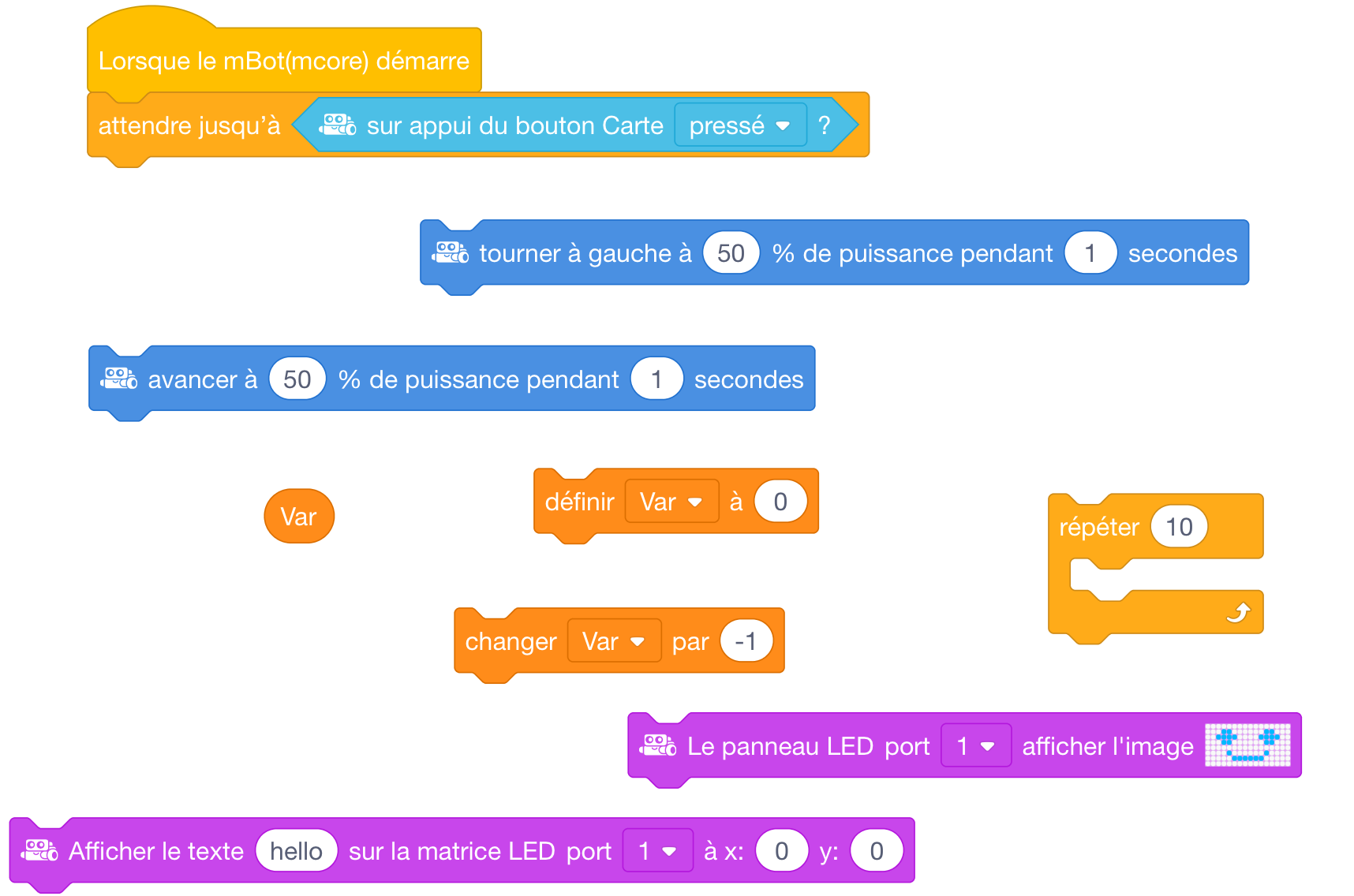
Via le port USB (en mode téléversement) depuis votre PC
Programme 5 : Leds⚓
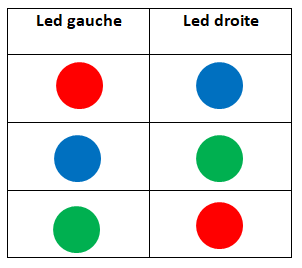

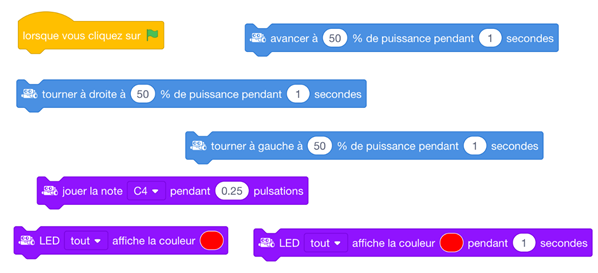
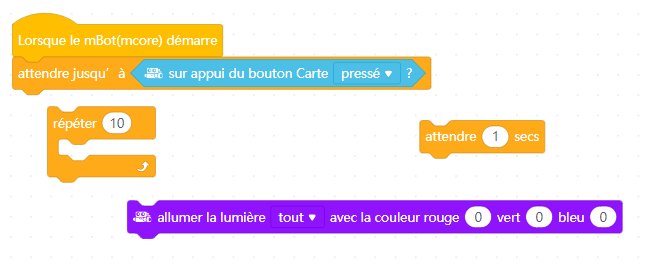
Conseil : Voici les blocs que nous conseillons d'utiliser :
Via bluetooth ou mode direct
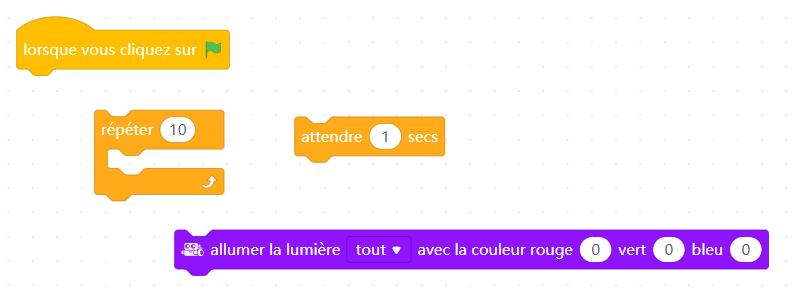
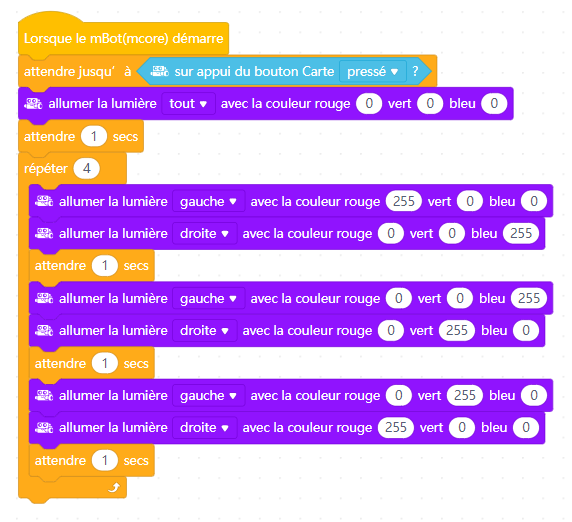
Via le port USB (en mode téléversement) depuis votre PC
Programme 6 : le robot musicien⚓


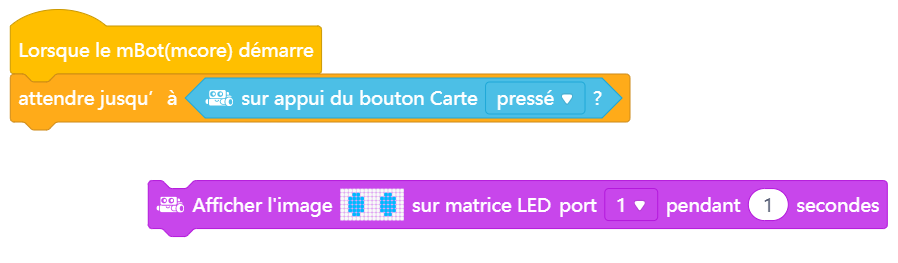
Programmes 7 : Affichage sur la matrice led⚓

Conseil : Voici les blocs que nous conseillons d'utiliser :
Via bluetooth ou mode direct
Via le port USB (en mode téléversement) depuis votre PC
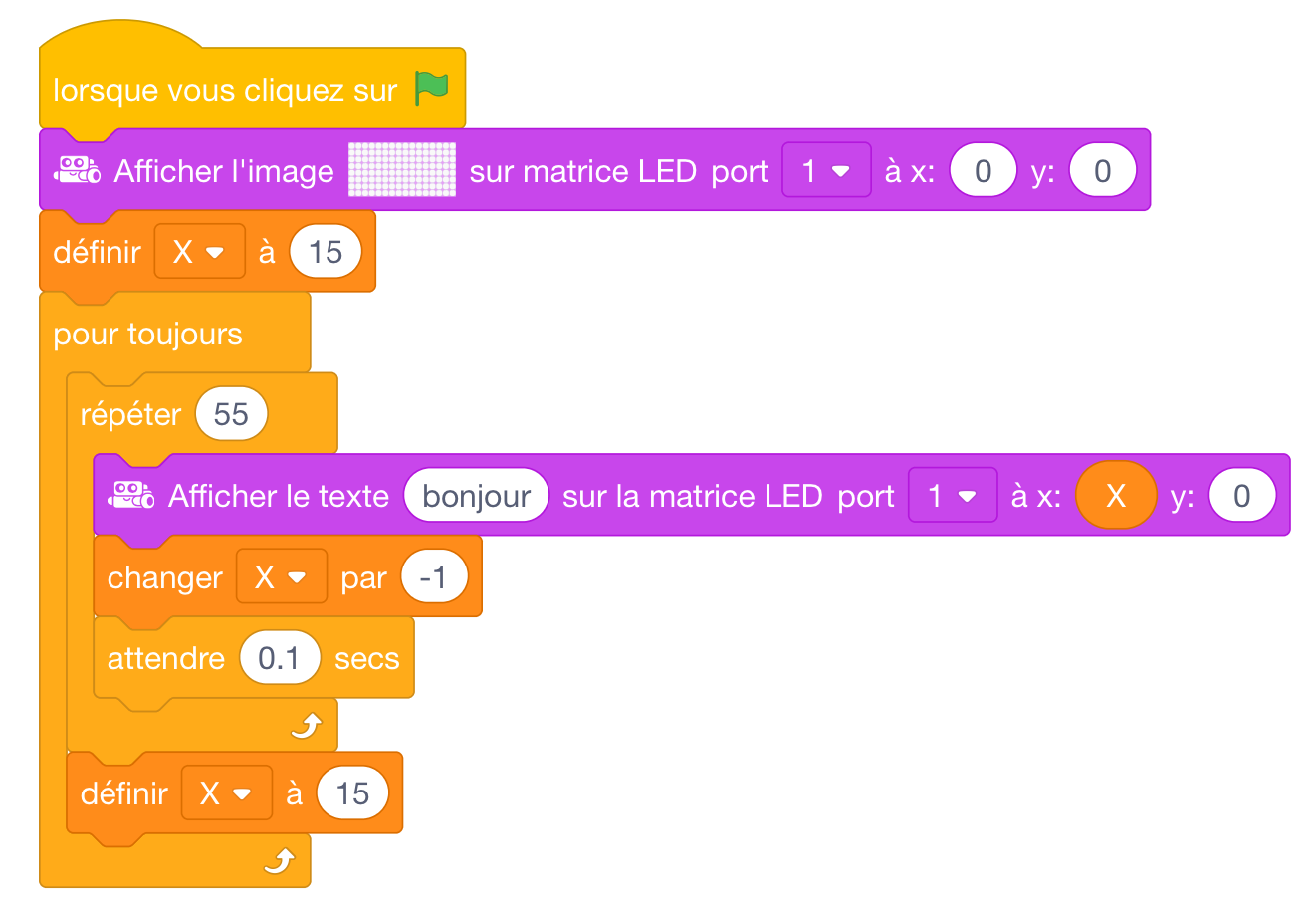
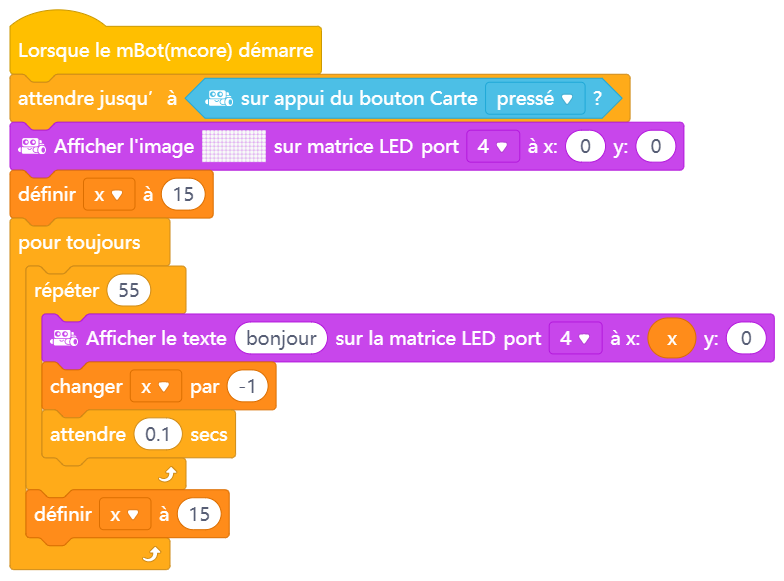
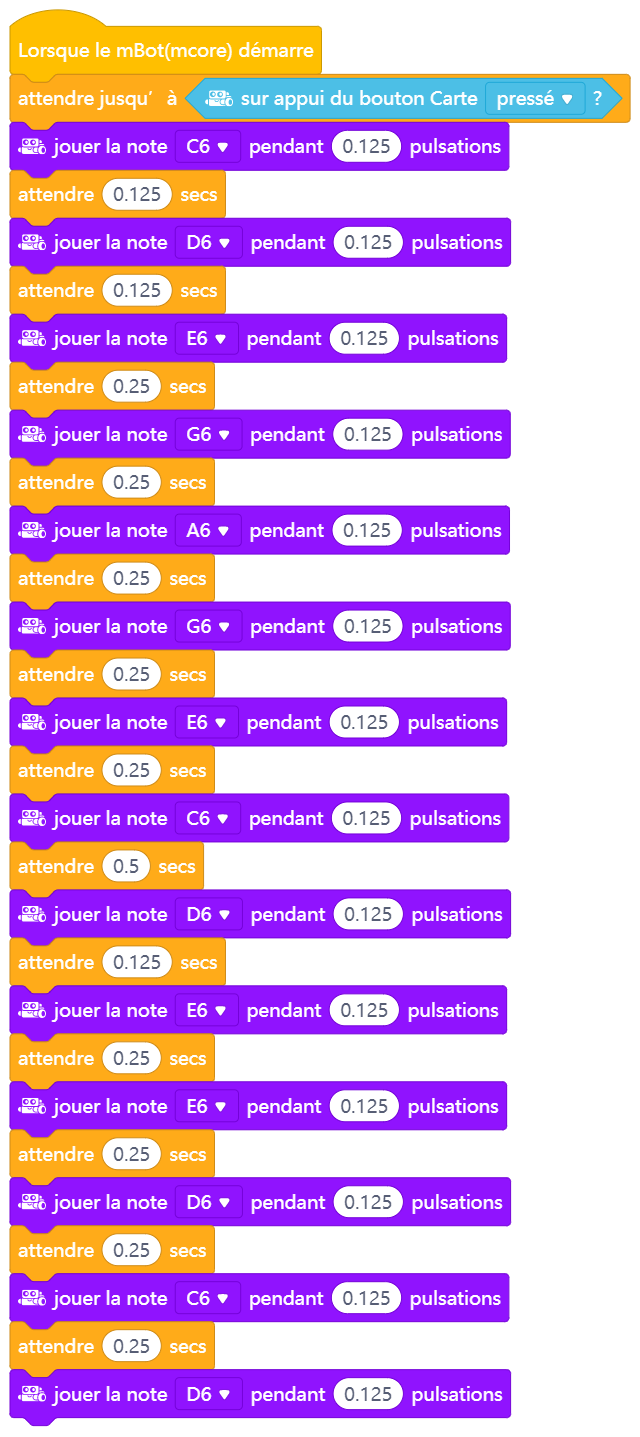
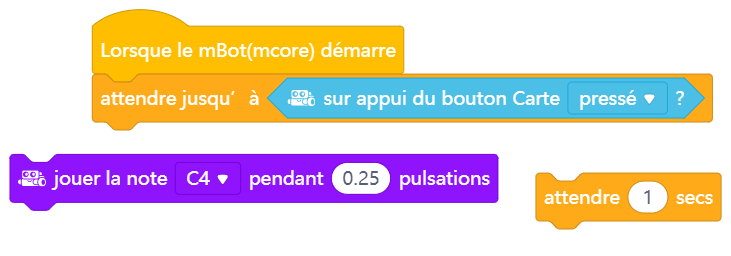
Conseil : Voici les blocs à utiliser pour ce programme :
Via bluetooth ou mode direct
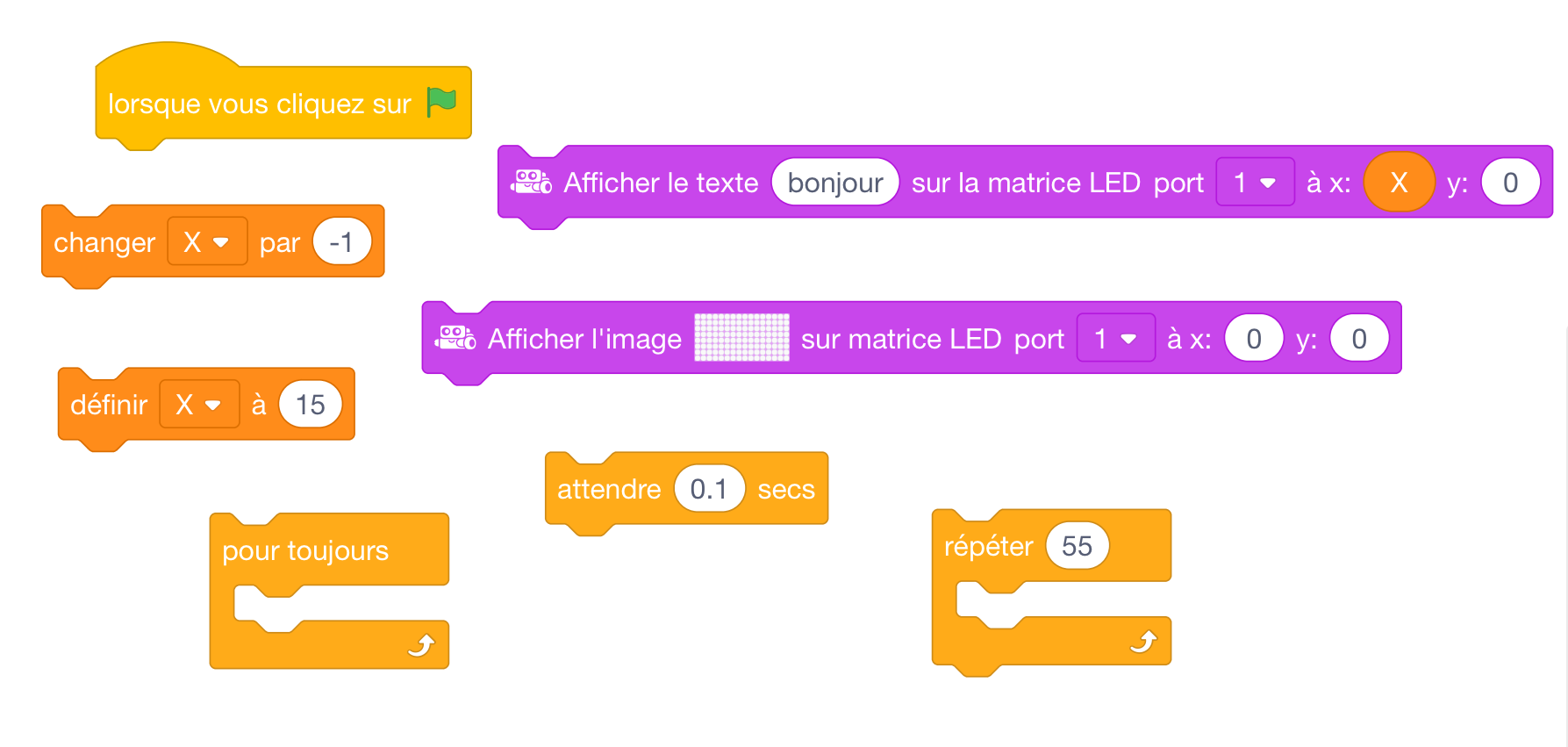
Via le port USB (en mode téléversement) depuis votre PC

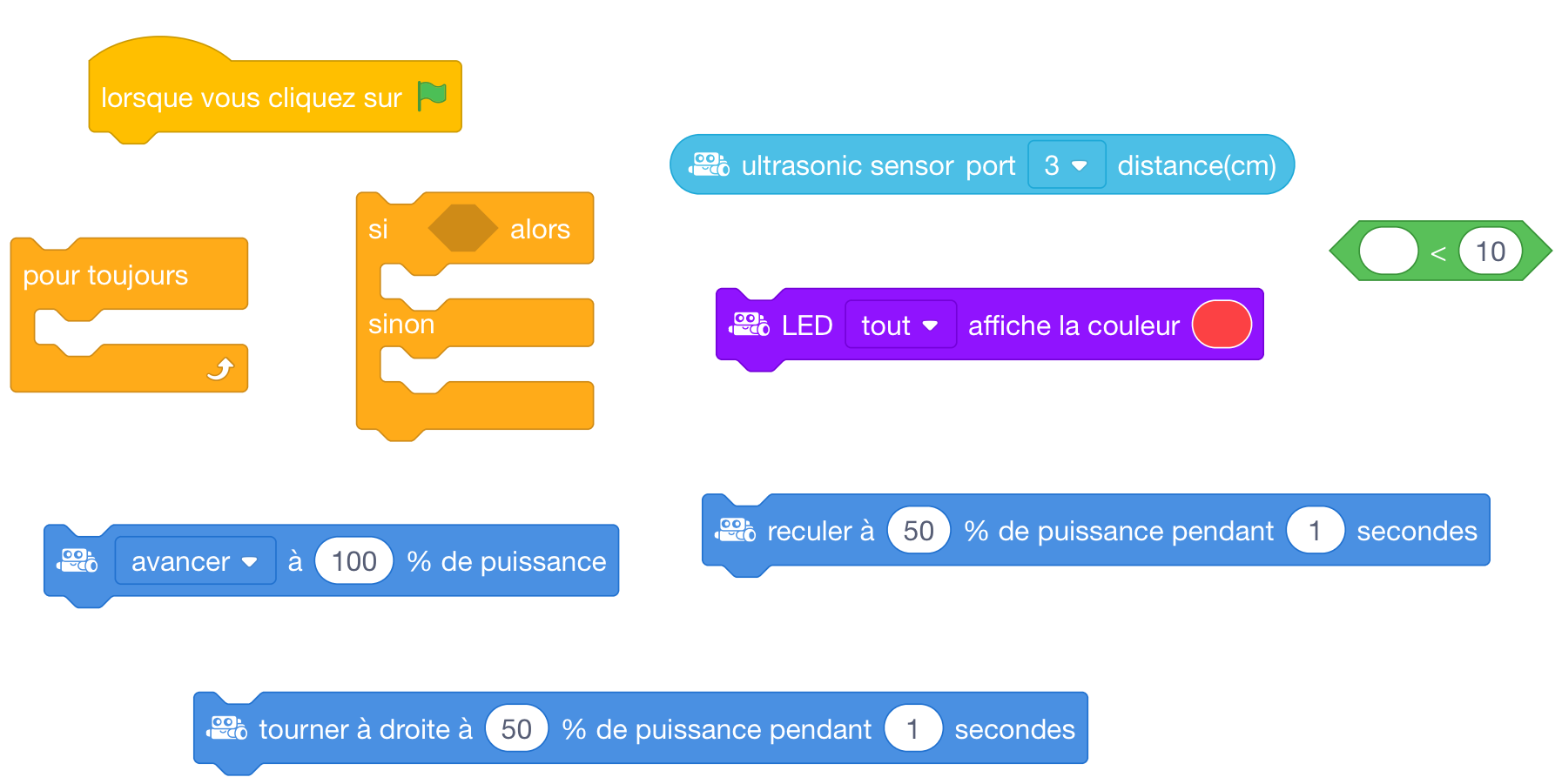
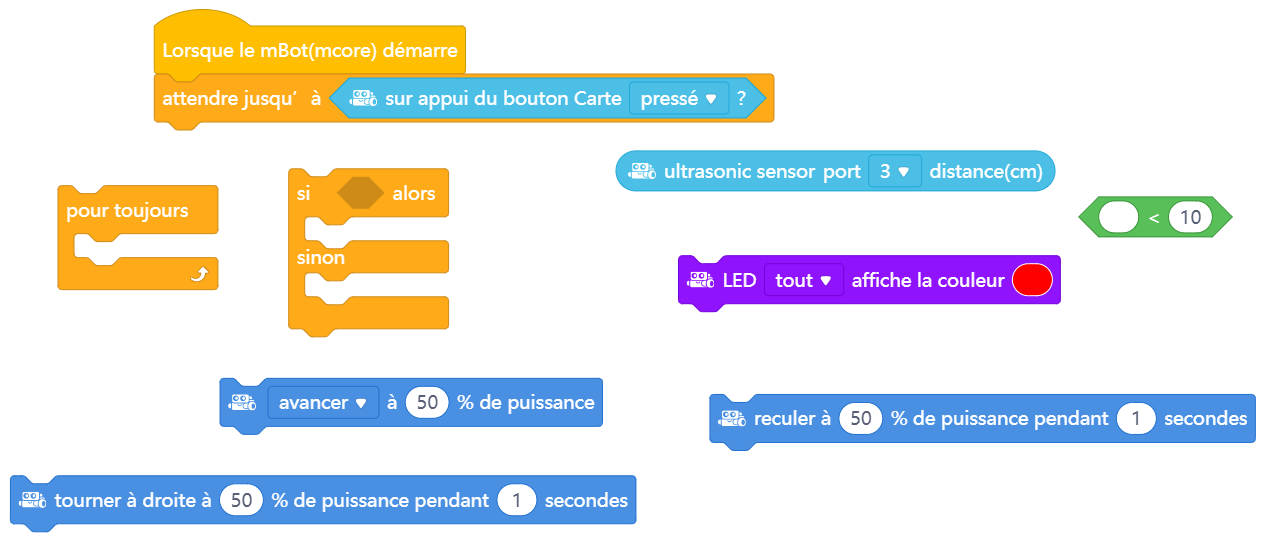
Programme 8 : Contournement d'obstacles⚓
Question⚓
Le programme doit permettre au robot de se déplacer en contournant les obstacles.
Lorsque le robot avance (100% de la puissance), ses leds sont vertes.
Lorsque la distance mesurée par le capteur à ultrasons (port 3) est inférieure à 10 cm, toutes les leds deviennent rouge, il recule (50% de la puissance durant 0.5s) et tourne à droite (50% de la puissance durant 0.5s).
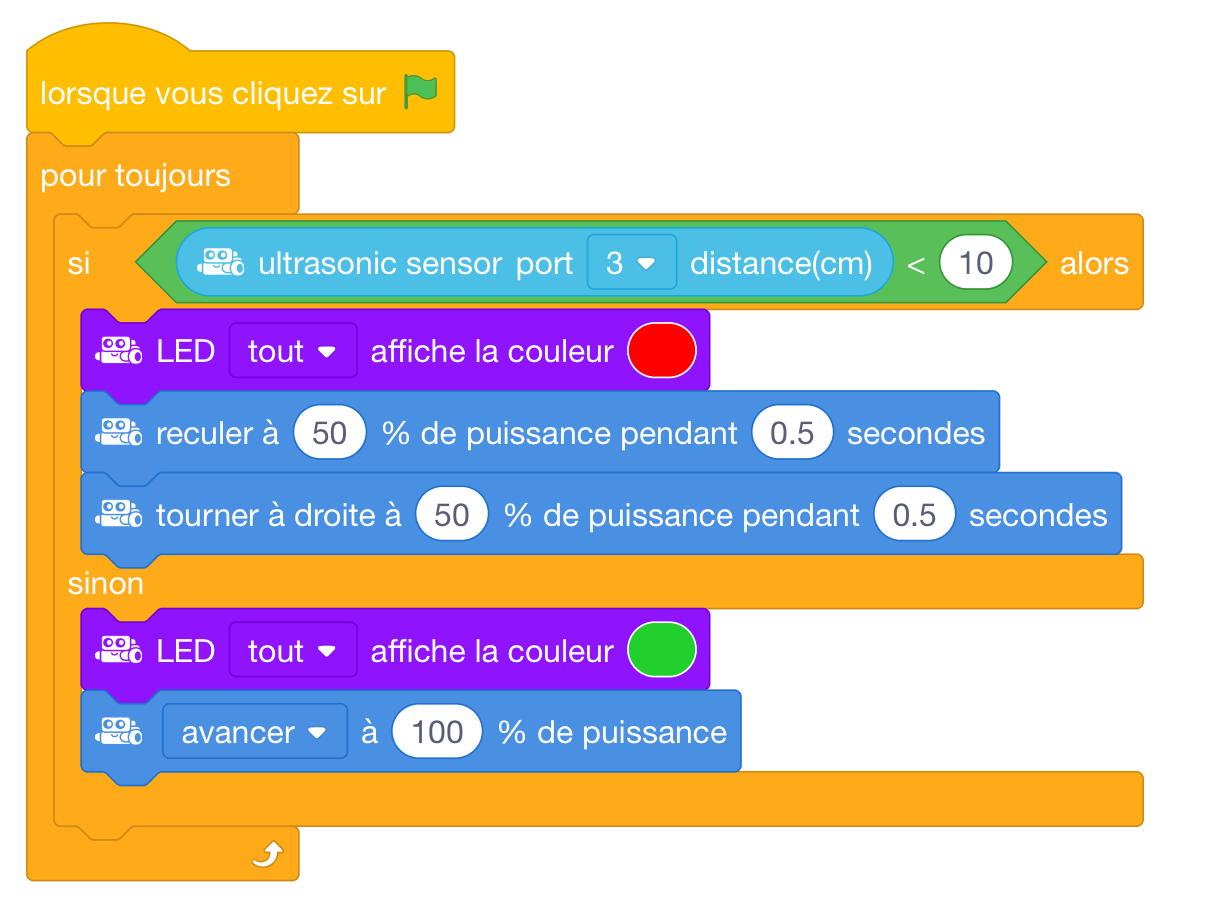
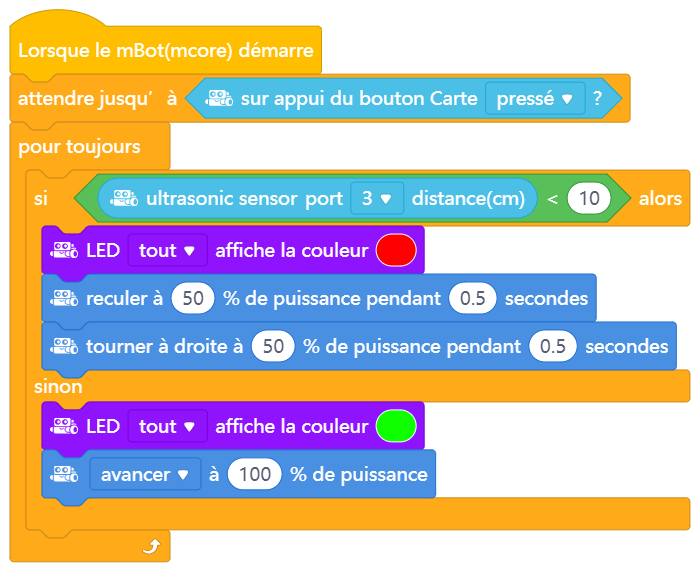
Conseil : Voici les blocs que nous conseillons d'utiliser :
Via bluetooth ou mode direct
Via le port USB (en mode téléversement) depuis votre PC
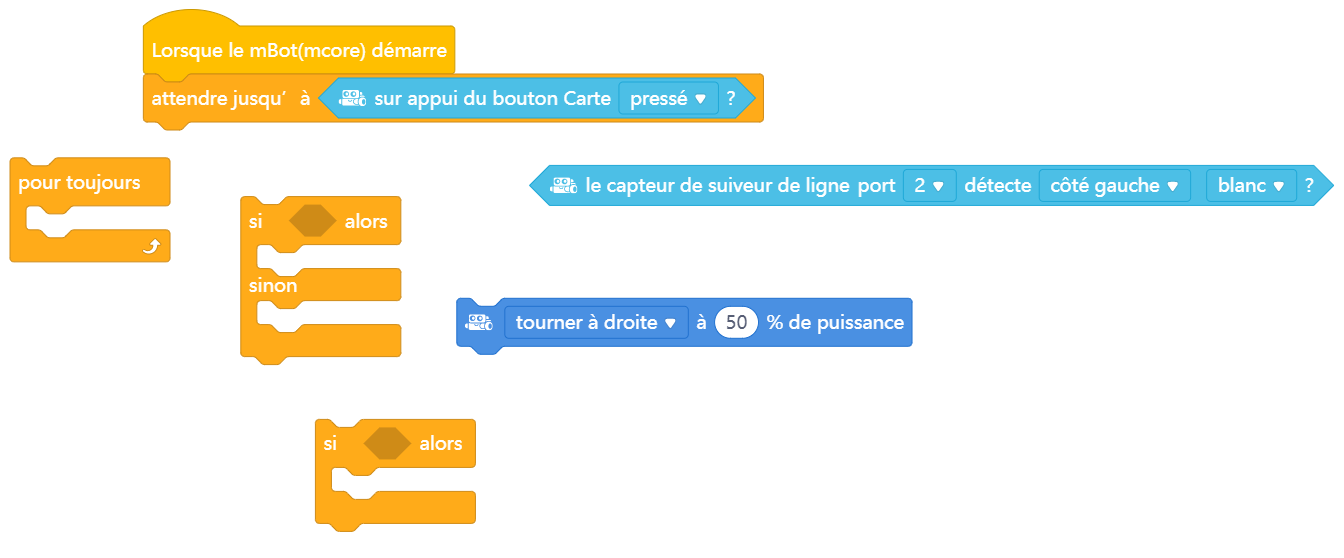
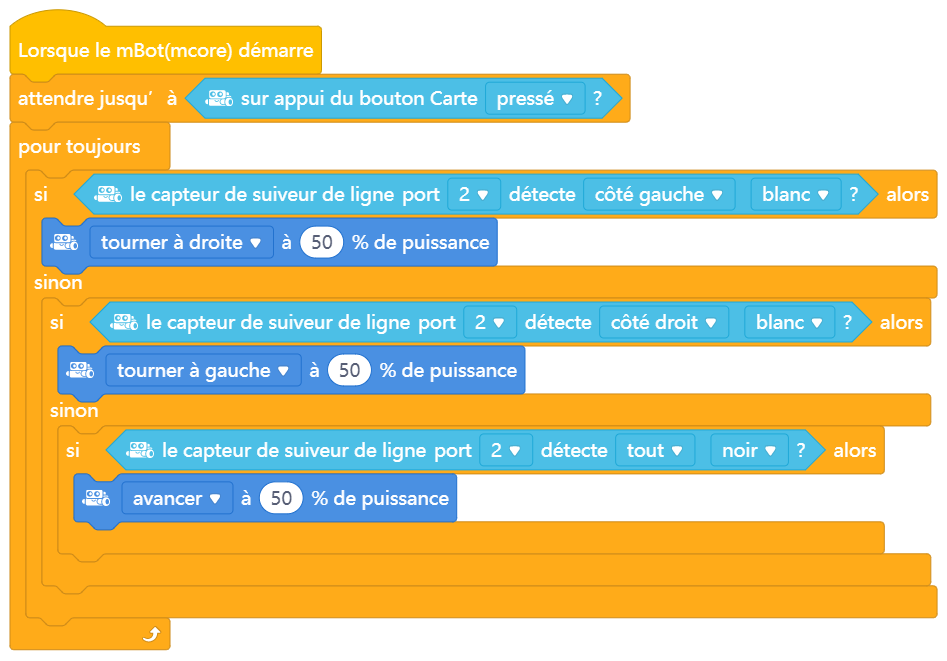
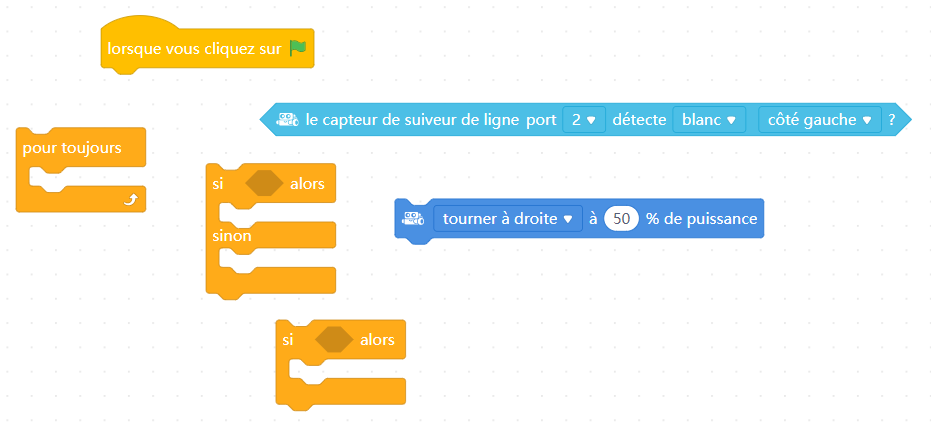
Programme 9 : Suivi de ligne⚓
Question⚓
Placer le robot sur la ligne (bande) noire du tapis de jeu fourni.
Le programme doit permettre au robot de suivre indéfiniment cette ligne tout au long du parcours. Vous utiliserez les capteurs de suivi de ligne (port2).
si un capteur détecte du "blanc" à gauche : il tourne à droite (50% de la puissance)
si un capteur détecte du "blanc" à droite : il tourne à gauche (50% de la puissance)
si les capteurs détectent du "noir" : il avance (50% de la puissance)

Conseil : Voici les blocs que nous conseillons d'utiliser :
Via bluetooth ou mode direct
Via le port USB (en mode téléversement) depuis votre PC